

Test autonome afvoer aardappeloogst met Machine Sync van John Deere
11 November 2025 door René Koerhuis (tekst); Peter Roek (beeld)

Machine Sync van fabrikant John Deere synchroniseert rijsnelheid en positie van een oogstvoertuig of -combinatie met een afvoercombinatie zodat die laatste – in theorie althans – onbemand z’n werk kan doen. Wat kan het systeem betekenen tijdens de aardappeloogst? Levert het ook winst voor de bodemstructuur op? Dit zijn de eerste ervaringen van een praktijkproef in Esbeek.
Verschillende (potentiële) deelnemers aan het Nationale Proeftuin Precisielandbouw (NPPL) zijn zeer geïnteresseerd in autonome afvoer van gewassen tijdens de oogst. Daarom onderzoeken NPPL en Wageningen Universiteit & Research (WUR) in hoeverre autonome gewasafvoer en automatisering tijdens de drukke oogstperiode kunnen bijdragen aan arbeidsverlichting én ‘bodemverlichting’. Optimale routeplanning kan namelijk helpen voorkomen dat trekkers met (volle) overlaad-/kiepwagens onnodig over een perceel en de kopakkers rijden. Om zodoende de bodem te ontzien en de impact van oogstwerkzaamheden op de bodemstructuur te beperken. Naast praktische toepassingen en voordelen van autonome gewasafvoer in het veld, wordt ook gekeken naar mogelijkheden voor veilig en autonoom transport tussen veld en opslag/schuur. Om dit oogstseizoen al te kunnen ervaren welke mogelijkheden bestaande technologieën bieden, is in oktober een eerste NPPL-praktijkproef gedaan met het Machine Sync systeem van John Deere.
Dit is Machine Sync
Machine Sync is een merkeigen oplossing van John Deere dat werkt volgens het leider – volger principe. De bestuurder van een voertuig – de leider – voorzien van RTK-gps systeem en stuurautomaat bestuurt in dat geval een volgende John Deere trekker – de volger -, eveneens met een stuurautomaat. Heeft de volger geen RTK-correctie maar wel een gratis John Deere SF1-signaal, dan kan de leider de RTK-correctie met de volger delen. De leider hoeft geen overigens John Deere voertuig te zijn maar kan bijvoorbeeld ook een zelfrijdende aardappelrooier zijn. Het systeem is initieel ontwikkeld voor combinaties van maaidorsers en trekkers met overlaad-/kiepwagens waarbij een maaidorser de leider is en de transportcombinatie de volger. Ofwel rijdend lossen vanuit een graantank. Voor deze toepassing is het systeem – ook in Nederland/Europa – op de markt sinds 2012. Sinds 2020 is de functionaliteit ook beschikbaar voor John Deere veldhakselaars en voor trekkers en daarmee technisch eveneens geschikt voor andere (oogst) situaties waarbij een oogstmachine continu lost in een transportcombinatie zoals bij het rooien van gewassen.
Technische vereisten
Om Machine Sync te kunnen gebruiken en benutten, moet het volgende voertuig vooralsnog een John Deere zijn vanwege veiligheidsoverwegingen omdat het systeem ingrijpt op de rijsnelheid. Qua trekkers zijn 6R, 7R en 8R modellen (met traploze transmissie) geschikt. In het geval van de NPPL-praktijkproef gaat het om een John Deere 6230R voor de aardappelrooier en een John Deere 6155R voor de kipper. Gps-technisch is een StarFire 6000, 7000 of 7500 ontvanger vereist voorzien van (eventueel gedeelde) RTK-correctie. In dit geval RTK-correctie via het mobiele netwerk waarvoor de StarFire ontvangers elk uitgerust zijn met twee zwarte sprietantennes. Op alle betrokken voertuigen moet de stuurautomaat functie (AutoTrac in John Deere termen) vrijgeschakeld zijn. Dit vergt een eenmalig licentiebedrag per voertuig. Tot zover geen verschil met een John Deere voertuig met AutoTrac stuurautomaat. Voor de communicatie tussen voertuigen onderling maakt Machine Sync gebruik van het modem en een wifi-verbinding. Daarvoor is naast een dunne extra sprietantenne, ook een eenmalig licentiebedrag per voertuig nodig. Indien je als gebruiker toestemming geeft, kan John Deere ook uitlezen hoeveel procent van de tijd Machine Sync in gebruik is. Machine Sync is ook geschikt voor oudere John Deere terminals tot aan de Greenstar 2630 toe. John Deere levert ook een variant van haar AutoTrac systeem voor gebruik op niet merkeigen voertuigen. Dit systeem, AutoTrac Universal, is tot nader order niet geschikt voor Machine Sync.

Voor de communicatie tussen voertuigen maakt Machine Sync gebruik van het modem en een wifi-verbinding via de dunne extra sprietantenne hier links naast de gps-ontvanger.
Dit doet Machine Sync
Als volger – in dit geval een John Deere 6155R met kipper, de transportcombinatie – rijd en bestuur je de trekker handmatig richting een voorgedefinieerd paars omkaderd U-vormig gebied (de werkzone) dat op de terminal in je trekker verschijnt. De afmetingen van dit gebied worden bepaald door de chauffeur van het leidende voertuig. Tegelijkertijd zie je op je display een zwarte stip met een pijltje dat de rijrichting aangeeft en de naam van het voertuig achter de stip. Naast de zwarte stip zie je ook een witte stip dat het thuispunt genoemd wordt. Dit thuispunt is vooraf ingesteld op basis van de afmetingen van de afvoercombinatie (lengte kipper) én de positie en afmetingen van het lospunt (losband) van de oogstmachine. En dient als doelpositie voor de transportcombinatie. Zodra je als volger in het U-vormige gebied bent en de knop (hervatten) stuurautomaat indrukt, kun je de handen losnemen van het stuur en de rijhendel en/of je voet van het rijpedaal. Het volgende voertuig rijdt dan eerst automatisch naar het thuispunt waarna de chauffeur in het leidende voertuig – in dit geval de John Deere 6230R met getrokken tweerijige aardappelrooier – de besturing en snelheidsregeling van de volger overneemt. De melding ‘Volger gekoppeld aan bewegingen leider’ verschijnt dan op het display van beide trekkers (voertuigen). Daarbij wordt de positie van de leider gesynchroniseerd met de volger. Zodra je als volger de automatische besturing overruled door handmatig te sturen, te versnellen of af te remmen, wordt de besturing door het leidende voertuig geannuleerd en moet je deze handmatig hervatten. Wel kun je als volger ‘stootjes geven’ en je voertuig zo stapsgewijs versnellen, afremmen en besturen.
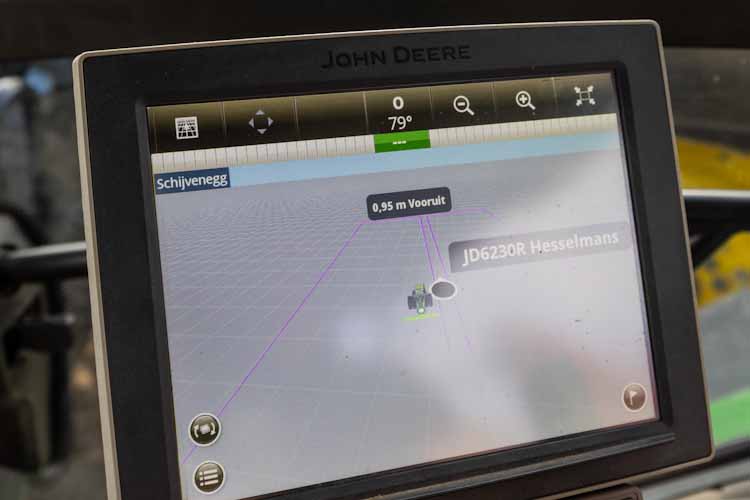
Machine Sync van John Deere synchroniseert rijsnelheid en positie van een oogstvoertuig of -combinatie met een afvoercombinatie zodat die laatste – in theorie althans – onbemand z’n werk kan doen. Als chauffeur van het volgende voertuig rijd en bestuur je de trekker handmatig richting een voorgedefinieerd paars omkaderd U-vormig gebied (de werkzone). Daar druk je op de knop (hervatten) stuurautomaat waarna de chauffeur van het leidende voertuig de besturing en snelheidsregeling van de volger overneemt.
Display
Als leider zie je tijdens het werk in het Machine Sync scherm deels dezelfde informatie op je display als de volger. Zo zie je ook de melding ‘Volger gekoppeld aan bewegingen leider’. De leider activeert of bevestigt de koppeling met een volger niet actief. Rechtsonder op het display zie je onder ‘stootjes geven’ vier pijltjes in beeld zoals op een toetsenbord van een computer. Bij elke toetsdruk beweegt de volger stapsgewijs naar voren, naar achteren of naar links of rechts. De grootte van elke stap stel je van tevoren in. In dit geval is gekozen voor stapjes van 1,95 meter vooruit, 0,95 meter achteruit en 20 centimeter opzij. De 1,95 en 0,95 meter zijn door de chauffeur van de oogstcombinatie afgestemd op de breedte van de losband en de lengte van de kippers die in dit geval voor elke kipper gelijk is. Andere vooraf te bepalen instellingen zijn de voorste en achterste rand van de werkzone (hier respectievelijk 35,0 en 50,0 meter), de breedte van het maaibord/werktuig (2,0 meter) en de lengte van de oogstcombinatie (9,14 meter).

Tijdens een eerste NPPL-praktijkproef met het Machine Sync systeem tijdens het rooien van aardappelen blijkt dat het verdelen van aandacht en voldoende zicht houden op de losband en de kipper de grootste uitdaging vormen voor de chauffeur van de rooicombinatie.
Nederlandse praktijk
Het idee is dus dat technologieën zoals John Deere Machine Sync dankzij automatisering en autonomie arbeidsverlichting kunnen bieden tijdens de drukke oogstperiode. En dat dankzij optimale routeplanning wordt voorkomen dat trekkers met (volle) overlaad-/kiepwagens onnodig over het perceel en de kopakkers rijden. Hoe pakt dat uit in de Nederlandse praktijk? Akkerbouwbedrijf Firma Hesselmans in Esbeek (N.-Br.) teelt 130 hectare fritesaardappelen en mocht Machine Sync een aantal dagen uitproberen. Mark Hesselmans over de eerste ervaringen: ‘Het werkt mooi. Het grote voordeel is dat de chauffeur van de transportcombinatie ontlast wordt en dat werkt perfect. Zeker als zo’n chauffeur minder ervaring heeft. Alleen de chauffeur van de trekker voor de rooier die al veel werk heeft, krijgt er nu een taak bij en dat is voor ons wel een nadeel.’ Het verdelen van aandacht en voldoende zicht houden op de losband en de kipper vormen hierbij de grootste uitdaging. Die is vooral fysiek van aard omdat de aansturing van de volger gaat via de terminal rechtsvóór en de losband en kipper zich linksachter bevinden. Een uitdaging die groter wordt bij gebrek aan daglicht.

Mark Hesselmans van akkerbouwbedrijf Firma Hesselmans: ‘Het grote voordeel is dat de chauffeur van de transportcombinatie ontlast wordt. De chauffeur van de trekker voor de rooier krijgt er echter een taak bij en dat is een nadeel.‘
Dit kan (nog) niet met Machine Sync
Mogelijk vanuit veiligheidsoverwegingen is het (nog) niet mogelijk om de trekker van de transportcombinatie onbemand te laten. Er moet vooralsnog altijd een chauffeur op de stoel in de volger zitten. Die chauffeur is ook zelf verantwoordelijk voor het tot stilstand brengen van de transportcombinatie. Als de oogstcombinatie stopt, rijdt de transportcombinatie momenteel door. Ook als het uiteinde van de losband zich in de kipper bevindt. Je kunt maximaal drie verschillende thuispunten instellen.
Hierom vindt NPPL autonome afvoer van gewassen belangrijk
Koen van Boheemen, NPPL-expert: ‘De Nationale Proeftuin Precisielandbouw (NPPL) werkt aan de praktijkadoptie van technieken die kunnen inspelen op belangrijke problemen/uitdagingen uit de praktijk. De afgelopen jaren hebben verschillende (potentiële) NPPL-deelnemers aangegeven dat ze zich in toenemende mate zorgen maken over hun arbeidsbezetting tijdens drukke periodes. Met de oogstperiode hierbij op de eerste plek. Daarnaast blijft er continue aandacht voor het voorkomen en/of beperken van bodemverdichting. Onder andere door tijdens de oogst minimaal en optimaal te rijden. In 2025 doet NPPL verschillende praktijktesten met systemen die een rol kunnen spelen bij het oppakken van deze uitdagingen. Het John Deere Machine Sync systeem speelt op verschillende manieren in op deze uitdagingen. Hoewel het systeem op dit moment een bestuurder vraagt op de trekker met kiep/overlaadwagen, legt het systeem een solide basis voor een autonome oplossing voor het onderrijden tijdens de oogst. Voor het zover is, is nog een paar technische stappen nodig. Ook zijn er belangrijke vraagstukken rondom veiligheid en aansprakelijkheid. NPPL zet zich de komende jaren in om, samen met betrokken fabrikanten, technieken zoals John Deere Machine Sync, geadopteerd te krijgen in de Nederlandse praktijk. Zodat meer tools beschikbaar komen om arbeids- en bodemverdichtingsproblematiek het hoofd te bieden.’

Koen van Boheemen (WUR): ‘NPPL zet zich de komende jaren in om, samen met betrokken fabrikanten, technieken zoals John Deere Machine Sync, geadopteerd te krijgen in de Nederlandse praktijk. Zodat meer tools beschikbaar komen om arbeids- en bodemverdichtingsproblematiek het hoofd te bieden.’

